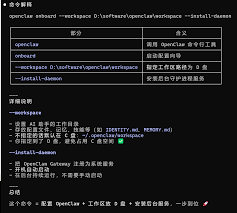
OpenClaw如何安装运行
openclaw是一款有趣且功能强大的开源机器人项目,它能为爱好者带来独特的机器人体验。下面就为大家详细介绍openclaw的安装运行步骤。
准备工作
首先,你需要准备一台运行linux系统的计算机。建议选择ubuntu等常见且稳定的发行版。确保系统已经安装好基本的开发工具,如gcc、make等。
下载openclaw代码
访问openclaw的官方代码仓库,通过git命令进行下载。在终端中输入:
```
git clone [openclaw仓库地址]
```
这将把项目代码下载到本地指定目录。
编译安装
进入下载后的openclaw目录,执行编译命令:
```
cd openclaw
make
```
编译过程可能会持续一段时间,期间会检查代码并生成可执行文件。编译完成后,使用以下命令进行安装:
```
sudo make install
```
硬件连接
openclaw通常支持多种硬件平台。如果使用的是常见的舵机等硬件,需要将它们正确连接到开发板上。确保电源供应稳定,连接线路无误。
运行openclaw程序
安装完成并连接好硬件后,就可以运行openclaw程序了。在终端中输入:

```
openclaw
```
如果一切顺利,你将看到openclaw启动并开始初始化硬件。
控制与调试
openclaw提供了一些简单的控制指令。你可以通过终端输入指令来控制机器人的动作,比如让它前进、后退、转弯等。如果在运行过程中遇到问题,比如硬件无响应等,可以通过查看终端输出的日志信息来进行调试。检查硬件连接是否松动,软件配置是否正确等。
进阶设置
对于有一定经验的用户,可以深入研究openclaw的配置文件。通过修改配置文件,可以调整机器人的参数,如运动速度、舵机角度范围等,以满足个性化的需求。
总之,openclaw的安装运行过程虽然需要一些步骤,但只要按照上述指南进行操作,就能顺利体验到机器人带来的乐趣。无论是机器人爱好者还是想要探索开源项目的朋友,openclaw都值得一试。快来动手安装运行,开启属于你的机器人之旅吧!
相关文章:
- 排行榜
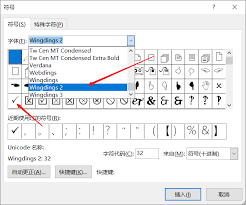
- Word文档如何打出对勾
- 1. 蜜蜂剪辑怎么开启自动保存
- 2. VideoPad怎么设置显示双预览效果
- 3. 百度网盘电脑版订阅分享位置在哪
- 4. 如何查看谷歌浏览器版本号
- 5. 极米如何进行投屏
- 6. 用Illustrator教你怎么绘制小花朵
- 7. 鲁大师如何查看处理器热设计功耗
- 8. 2345看图王如何增强图片效果
- 9. 美图秀秀网页版如何添加水印
- 10. 口袋写作如何导出
 网公网安备
网公网安备